A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
4.8 (679) In stock


Two gait models used in this study. (a) Simplest walking model with a

Investigation of the relationship between steps required to stop and propulsive force using simple walking models - ScienceDirect

PDF) A powered simple walking model explains the decline in

Estimation of quasi-stiffness of the human hip in the stance phase
A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
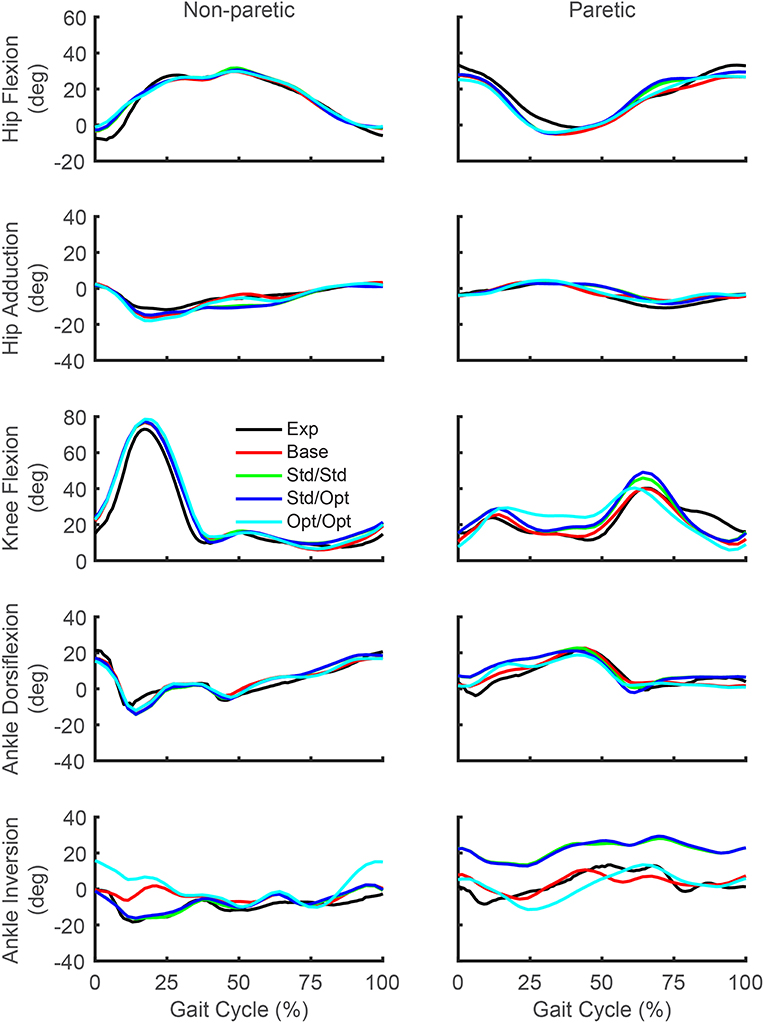
Frontiers Computational Design of FastFES Treatment to Improve Propulsive Force Symmetry During Post-stroke Gait: A Feasibility Study

Muscle Activity During Gait - Physiopedia

A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Interpreting Joint Moments and Powers in Gait

Muscle Activity During Gait - Physiopedia

Motion Trajectory Optimization of an Assistive Device During

Exoskeleton torque and exoskeleton power. A and B The exoskeleton

教員紹介

Voluntary changes in step width and step length during human walking affect dynamic margins of stability. - Abstract - Europe PMC
Research articles Scientific Reports
One Minute of Corsets with Raven -What Is Hip Spring?
How to Use Hip and Rib Springs – Timeless Returns
Entertaining with Asian Spring Rolls • Hip Foodie Mom
 Natori Streamline Strapless Full-Figure Bra Full figure bras, Dresses formal elegant, Full figured
Natori Streamline Strapless Full-Figure Bra Full figure bras, Dresses formal elegant, Full figured Charlotte Hornets Injury Update
Charlotte Hornets Injury Update Under Armour Women's UA Reversible Webbing Golf Belt - Carl's Golfland
Under Armour Women's UA Reversible Webbing Golf Belt - Carl's Golfland On-The-Go Medium Impact Sports Bra - Fabletics
On-The-Go Medium Impact Sports Bra - Fabletics Wyoming High School presents Mamma Mia!
Wyoming High School presents Mamma Mia!- BRA PARADISE K496 black, size 85L
